Emil Chr. Hansen and the yeast revolution

Prof. Dr. Emil Chr. Hansen, bust at Carlsberg brewery, Copenhagen |
In the late summer of 1883, disaster struck at the Carlsberg brewery in Copenhagen. The beer started smelling off, and had an unpleasant bitter taste. The dreaded "yeast sickness" had hit Carlsberg, a heavy blow to brewery owner Jacobsen, who used to boast that Carlsberg had never had this problem and were still using the original yeast Jacobsen brought from southern Germany four decades before.
Pasteur had shown brewers how to use an acid wash to remove bacterial infections from their yeast, but that was not the problem here. Something was wrong with the yeast itself. This was something that happened from time to time, and the usual solution was to get fresh yeast from another brewery.
At this time breweries were taking their yeast from the previous batch of beer and pitching it into the next. This was something every single brewery on the planet did, except the ones using spontaneous fermentation, because there was no alternative. So until 1883 every brewery was using their yeast in the same way as the farmhouse brewers using kveik.

The Jacobsen family, Carlsberg brewery, Copenhagen |
If the yeast became infected the infection would circulate from one batch to the next, and the only way out was to get yeast somewhere else. Jacobsen decided to get fresh yeast from the German brewery. However, inspired by Pasteur Carlsberg had established a research laboratory a few years before, and now Emil Chr. Hansen, one of the scientists there, went to work on the problem.
To solve it, he would have to somehow split apart the various components in the yeast and analyze them separately to see what they did. Pasteur had used methods were he grew the culture in a sequence of challenging conditions, so that some organisms would die, leaving only the one Pasteur wanted to study. That didn't work here, because the yeasts were too similar to each other.
So Hansen had to take a more radical approach: he decided to grow cultures from single cells. That way he could be absolutely sure that each culture contained only a single kind of organism, and he could find out which kinds of yeast were in the Carlsberg yeast. That ought to shed light on the problem. But how to get down to single cells?
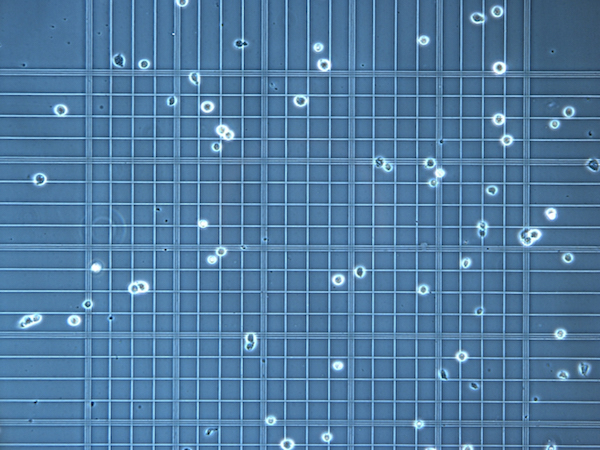
Cells on counting grid, Alcibiades, Wikimedia Commons |
{kind=link}
His solution was ingeniously simple. He diluted yeast sludge in a bottle, then shook it powerfully to distribute the yeast evenly. He took a small sample volume, and spread it out on a glass with an evenly spaced grid, under a microscope. With the help of the grid he could count the cells in the sample, and estimate how many cells there were per cubic centimetre.
From that count it was simple to compute how many times he would need to dilute his culture so that each cubic centimetre would contain on average 0.5 cells. He then took many single-cubic centimetre samples, and transferred them to bottles of sterilized wort. Of course, there would be no knowing exactly how many cells made it into each bottle, but on average it should be 0.5.
If the bottles were kept still and at even temperature, the cells would drift to the bottom and stay there. They would start growing, eventually forming tiny visible spots. Most flasks would have no spots, because they received 0 cells. Many would have exactly one spot. And some would have more than one spot, because they received more than one cell. Hansen would keep only the bottles with a single spot, and he would have split the culture into separate strains of yeast.
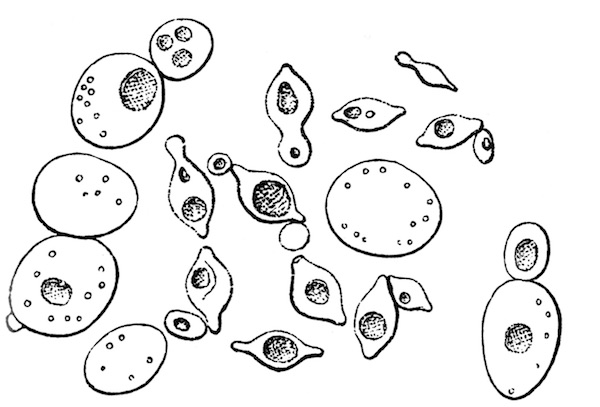
Saccharomyces pastorianus and Saccharomyces apiculatus |
Using this method Hansen quickly established that the Carlsberg yeast now contained two different types of yeast. One was the original lager yeast. Hansen showed that if this yeast were pitched alone it produced good beer. The other yeast looked ellipsoid in the microscope, and when it was added to the wort the beer went off. So the other yeast was clearly the source of the problem. Hansen traced it to an orchard just outside the brewery.
This was already amazing progress. Hansen had now beyond any doubt established what the cause of the "yeast sickness" was. Hansen, however, was only just getting started. He had a radical idea for transforming the management of brewer's yeast. His motivation is quite clear from his own words:
In many breweries one can see that no steps are taken [to prevent infection]. The spent yeast is spilled in the yard, and carried down into the fermentation cellars on the boots of the workers, or it dries to dust out there, and is blown by the wind into the coolships. From here some of the organisms of disease reach the fermenters, where they start to develop. To begin with they develop slowly, so that there is no sign of danger, [...] but in the end there is so much wild yeast in the pitching yeast that the disease breaks forth. From that moment the development runs with tearing speed, and soon all the beer in the brewery will be infected. It is because of cases like these that brewers often speak of the disease as something mystical: "If it comes, one just has to accept it, and it's really no use resisting. It is an accident that nobody can guard against." Then people switch yeast, and if the new yeast from brewery A does not solve it one tries yeast from B, and so on. But that the fight must be made part of daily operations people rarely consider.
Making the fight part of daily operations was exactly what Hansen was about to propose. But first he had more work to do.
Emil Chr. Hansen in his lab, photo by Frederik Riise, Wikimedia Commons |
{kind=link}
How many kinds of yeast were there really in that sludge? Some kinds looked clearly different in the microscope, but did the others necessarily have to be the same just because they looked the same? Hansen put them through a battery of tests, and discovered that the answer was a definite "no." Some grew at temperatures the others could not tolerate. Staining tests gave different results. Some formed pellicle when others did not. Some ate types of sugars that the others could not. And so on.
He found that the original lager yeast was not a single yeast, but two slightly different strains of yeast, which he named Carlsberg No 1 and Carlsberg No 2. He preferred No 1, but No 2 was also perfectly usable in brewing.
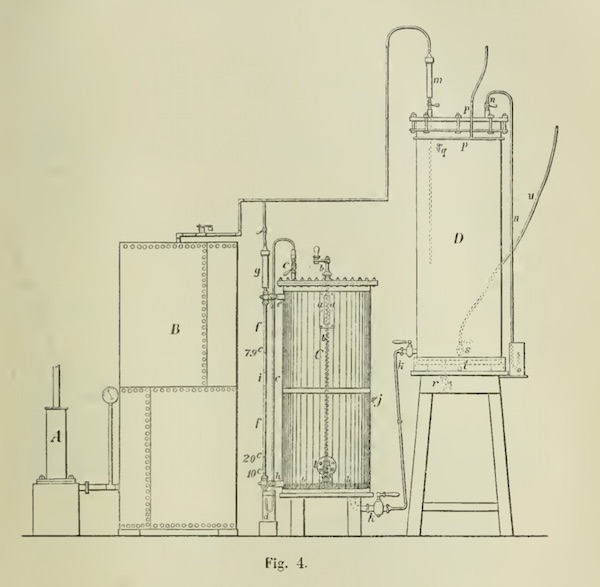
Hansen's yeast propagation apparatus, Carlsberg, 1888 |
But how to get them into the brewing? He had only tiny samples of these pure cultures, far too little to pitch in an industrial brewery with huge batch sizes. And growing the cultures was of course a risky operation, since any infection would be grown together with the pure yeast. However, Hansen solved this problem, and together with the head brewer he even developed an apparatus for safely growing yeast.
Hansen managed to persuade brewery owner Jacobsen to adopt his pure culture. Of course, as Hansen observed, once the pure culture was introduced and used in the same way as the old mixed culture it would not remain pure forever. He found that Carlsberg No 1 would remain pure 6-8 months, while No 2 only 2-4 months. He therefore proposed going back to the original pure culture at intervals in order to prevent wild yeast infections from getting established.
With this, Emil Chr. Hansen single-handedly revolutionized brewing. At a stroke, he had shown the cause of the "yeast sickness", found a solution, shown that the yeast consisted of several strains with different properties, shown how to select the best strain, and developed a solution for safely growing yeast. Suddenly, there was a superior alternative to the method of forever reusing your yeast.
But note one thing carefully: many people have wondered how the brewers using kveik could keep their yeast cultures going for many generations. As you can now see, all brewing yeasts have been used that way for many, many generations before they were taken into the lab and purified. The only thing that's special about kveik is that people are still using them the old way 135 years after the alternative was developed.

Carlsberg brewery entrance |
Brewery owner Jacobsen was rightly proud of the revolutionary innovation that Carlsberg had produced, and promoted the new method across Europe. Hansen found himself very much in demand as brewers clamoured to learn how to apply his method. And it really was known as "Hansen's method." Despite being fairly radical, the method spread like wildfire across Europe and beyond.
In 1888 Hansen gave a summary of who had started using his method, and says all the major breweries in Denmark and Norway were using it. It was common in many highly reputed breweries in Russia, the Netherlands, and Germany. And it had been adopted by at least some in Sweden, Finland, Austria-Hungary, Switzerland, Italy, France, Belgium, and North America. Carlsberg had sent pure yeast cultures to Asia, Australia, and South America. All this within five years. And in the 19th century, no less.
The only place where breweries were resisting Hansen's method was in the UK, where the brewers claimed that the pure cultures quite simply did not give the right taste, especially to the matured beer. Hansen himself noted this and wrote that something about strong, top-fermented beers seemed to be different. Today, of course, we know what was going on: British yeast cultures contained Brettanomyces, and without it the beer wouldn't mature in the right way. But even the UK would eventually change its mind about this.
Mixed, backslopped cultures were rapidly on the way out. So rapidly, in fact, that soon nobody would remember that yeast had once been something the brewer had and maintained himself, and not something that came from a laboratory.
Appendix: Historical accuracy
Writing this blog post was very difficult, because the full story is a bit more complicated, but including all the details in the main text makes it hard to read and just obscures the main points. So I've moved the details here for people who want to know more.
The dilution method for producing pure cultures was something Hansen got from Nägeli and Fitz, who had developed it for bacteria. Hansen first tried it out in 1882, when Tuborg, another brewery in Copenhagen, was struck by the "yeast sickness." He managed to find the cause of Tuborg's problem, but Tuborg chose to get fresh yeast from Carlsberg instead.
The counting grid was already developed for counting blood cells, and was known as a hemocytometer.
Today, microbiologists generally streak out their cultures on plates of gel and study the colonies that grow there in order to separate them into strains. Hansen was aware of this method. He learned it during a visit to Robert Koch's laboratory in 1882. However, Hansen had to develop it a little further to get absolutely pure cultures.
Hansen says that after a few years he mostly switched to the plating method, because the dilution method was more work and more difficult, and also expensive because it required so many bottles.
The methods for classifying and identifying yeast strains by methods beyond just observing their shapes in the microscope seem to have been invented by Hansen.
Sources
Nordens Pasteur - fortællingen om naturforskeren Emil Chr. Hansen, Kristof og Kirsten Glamann, Gyldendal, 2004. ISBN 9788702025002.
Meddelelser fra Carlsberg Laboratoriet, 1. bind, Carlsberg Laboratoriet, 1882, København.
Meddelelser fra Carlsberg Laboratoriet, 2. bind, Carlsberg Laboratoriet, 1888, København.
Practical Studies in Fermentation, Being Contributions to the Life History of Micro-organisms, Emil Chr. Hansen. E & FN Spon: London, 1896. Translated by Alex K. Miller.
Similar posts
Was all beer sour before Pasteur?
It's often said that before Pasteur's work on yeast (and Emil Christian Hansen's introduction of the pure-yeast system) all beer was sour
Read | 2014-10-26 18:01
Yeast terminology, part 1
I was asked to explain the family trees of yeast and since not much has been written on this I figured I'd give it a go
Read | 2015-08-27 18:54
Farmhouse yeast: what do we know?
There's a lot of excitement over kveik at the moment, but kveik is only one kind of farmhouse yeast
Read | 2021-02-06 20:33
Comments
Joako - 2017-09-11 00:57:20
Great post!, I'm from M�xico and I run a beer blog, can I translate this to share with spanish speaking people?, of course I'll give you all the credit. Anyway, thank you for this.
Cliff - 2017-09-11 05:09:45
Great story Lars.
Thanks for putting in the time and effort required.
Lars Marius Garshol - 2017-09-11 06:32:19
@Joako: Sure! As long as you name me as the author and include a link to this page, please do translate.
Jon - 2018-06-11 12:17:10
Hallo Lars, really great work - you must be leaving are away from the well!
"Today, of course, we know what was going on: British yeast cultures contained Brettanomyces, and without it the beer wouldn't mature in the right way."
Would you still say this in 'the' or the only reason why english brewers initially disregarded pure yeast brewing (aside the also commonly mentioned reason of fearing that the drastic palette change wouldn't be well received with local patrons).
Looking at the few remaining, continously pitched UK yeasts like Harveys and Adnams(?) I understand most of them to be multistrain yeasts containing no Brettanomyces.
I'm also curious if the homogenious nature (genealogical and cultural age) of pure yeast starter used for only a few generations vs a continously backslopped (single strain) yeast could be partially responsible? I imagine especially over longer storage times the effects of different behaviours like the formation of cell communities, age-associated changes in phenotype expression, age distribution, floccuation could become more obvious. With that in mind - the variety of fermentation processes and fermentation geometry prior to the popularity of conical fermentors in industrial brewing likely enhanced existing cultural environments and preferences.
In another post you mention that several norwegian farmouse ale makers blended earlier dried Kveik samples. Could that be related or more likely be the result of diversifying of strains, ensuring health and/or re-balancing the ratio of the different strains?
Thank you!
Jon - 2018-06-11 12:22:52
See also:
ESTIMATION OF THE AGE OF CELLS IN POPULATION OF YEAST (H. S. Hough, May, 1961) https://onlinelibrary.wiley.com/doi/pdf/10.1002/j.2050-0416.1961.tb01829.x
Flocculation in Saccharomyces cerevisiae: a review (E.V. Soares, November 2010) https://onlinelibrary.wiley.com/doi/full/10.1111/j.1365-2672.2010.04897.x
Lars Marius Garshol - 2018-06-11 16:10:31
@Jon: Given that many British brewers held on to multi-strain brewing for another 60 years at least, and without mainly producing matured beers, I think the main reason must be something else. But whether it was pure conservatism or something else I don't really know.
I don't know if there still is anyone doing backslopping other than Harvey's. Their yeast is Saccharomyces cerevisiae and Debaryomyces hansenii.
Whether fermenter geometry and materials played a role is hard to say, but if we can judge by farmhouse ale it would seem that the yeast tends to be mostly a single species regardless. The farmhouse brewers use all kinds of fermenters, but even so out of 35-40 cases we've only seen 2-3 multi-species cultures.
We don't really know why they blended the yeast. All they can tell me is that they learned that it was necessary, or the yeast would grow "weak". I haven't really managed to discover any underlying reason.
Lars Marius Garshol - 2018-06-11 16:13:26
@Jon: It looks like you're right. Adnams seems to still be using multi-strain yeast: http://adnams.co.uk/about/news/beer-news/yeast-is-yeast/
ivor Reid - 2018-09-26 19:24:39
Thought you might like to know that we have just refurbished our original Hansen 'pure yeast' propagators acquired specifically for the brewing of Tennent's Lager at the end of the Nineteenth Century. Tennent's had been successfully brewing at Wellpark Brewery in Glasgow since 1556 and were pioneers in UK lager brewing in 1885. Lager proved a great success in both Scottish domestic markets and International markets winning many awards for the quality of the product. Recognition of the importance of yeast management and the use of Hansen propagators no doubt contributed Tennent's becoming the UK predominate lager brewer. The Hansen Propagators will be a focal point within the new "Tennent's Story visitors centre" opening soon at Wellpark Brewery, Glasgow.
Ivor Reid retired employee and archivist
Tofty - 2019-03-02 18:15:28
"Carlsberg No 1 would remain pure 6-8 months, while No 2 only 2-4 months." How about a mixture of No 1 & 2, how long had carlsberg been brewing with that mixed culture for before they got contaminated? Kveik is a mixture of different strains of yeast, is it not? Maybe a mixed culture can out compete contaminants better than an isolated strain?
Lars Marius - 2019-03-04 07:02:24
@Tofty: Carlsberg brewed with their original culture for 36 years before it got contaminated enough that they could taste the difference. I'm not sure exactly how to interpret what Hansen wrote there, because at that point he was checking the yeast by microscope, which Carlsberg didn't originally do.
Can a mixed culture compete better than a single strain? To be honest I have no idea. I don't know if anyone knows.